Flexible Robotic Manipulator
Flexible robot manipulator systems offer significant advantages over traditional rigid robots, including faster response times and lower costs. However, their flexibility introduces vibrational motion that is challenging to control. Developing an effective mathematical model and its computer implementation is crucial to understanding and managing this flexibility, enabling engineers to design efficient flexible manipulator systems.
Professor Azad has been engaged in research on the computer modeling, simulation, and control of flexible robotic manipulator systems since 1989.

A Flexible Manipulator
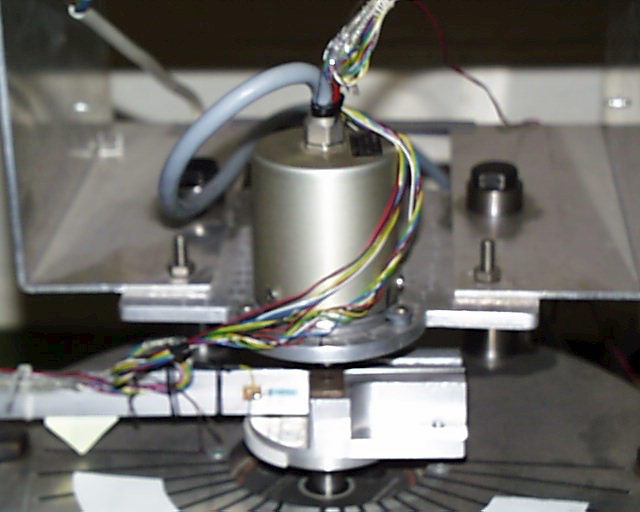
Hub area with Transducers
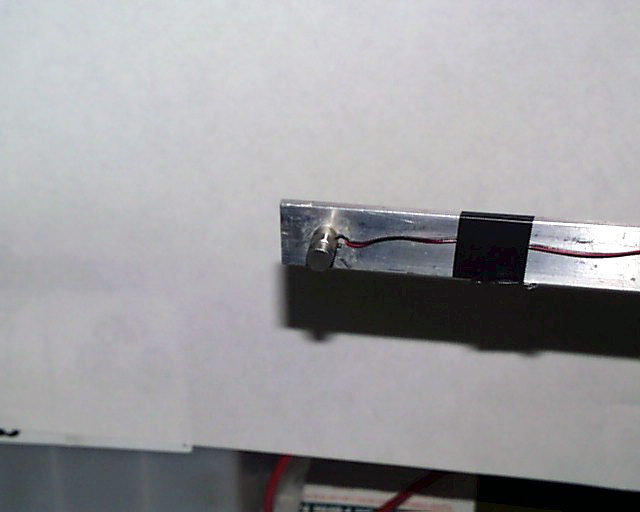
Accelerometer at the end point

Hub area with Actuator and Transducer